Publications
Please refer to Prof. Jiachen Li’s Google Scholar for a complete list of publications.
Recent Highlights

Drive My Way : Preference Alignment of Vision-Language-Action Model for Personalized Driving
IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR 2026)

CommCP: Efficient Multi-Agent Coordination via LLM-Based Communication with Conformal Prediction
IEEE International Conference on Robotics and Automation (ICRA 2026)

GUIDES: Guidance Using Instructor-Distilled Embeddings for Pre-trained Robot Policy Enhancement
IEEE International Conference on Robotics and Automation (ICRA 2026)

Reducing Oracle Feedback with Vision-Language Embeddings for Preference-Based RL
IEEE International Conference on Robotics and Automation (ICRA 2026)



Interactive Autonomous Navigation with Internal State Inference and Interactivity Estimation
IEEE Transactions on Robotics (T-RO), 2024
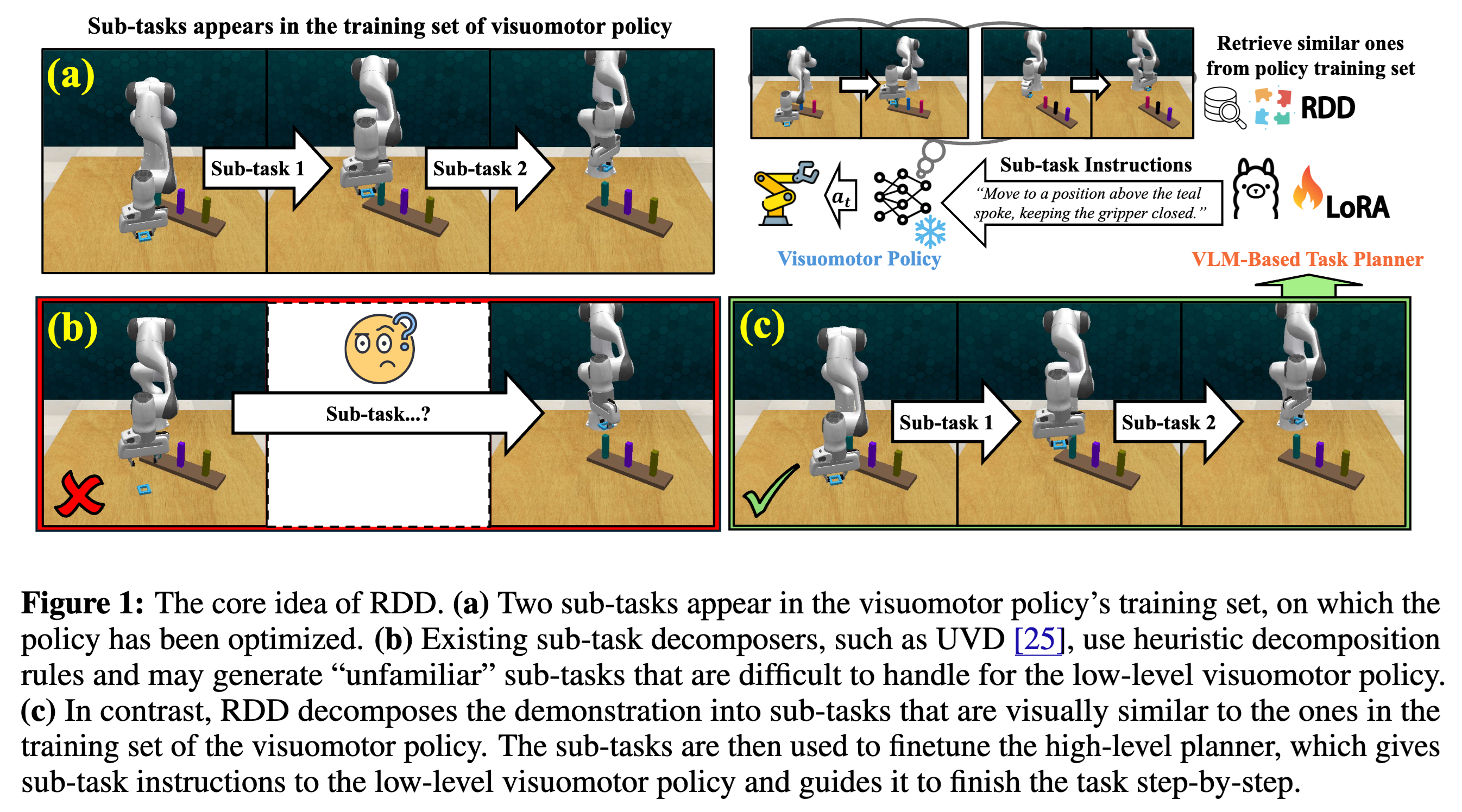
RDD: Retrieval-Based Demonstration Decomposer for Planner Alignment in Long-Horizon Tasks
39th Conference on Neural Information Processing Systems (NeurIPS 2025)

Towards Generalizable Safety in Crowd Navigation via Conformal Uncertainty Handling
Conference on Robot Learning (CoRL 2025)
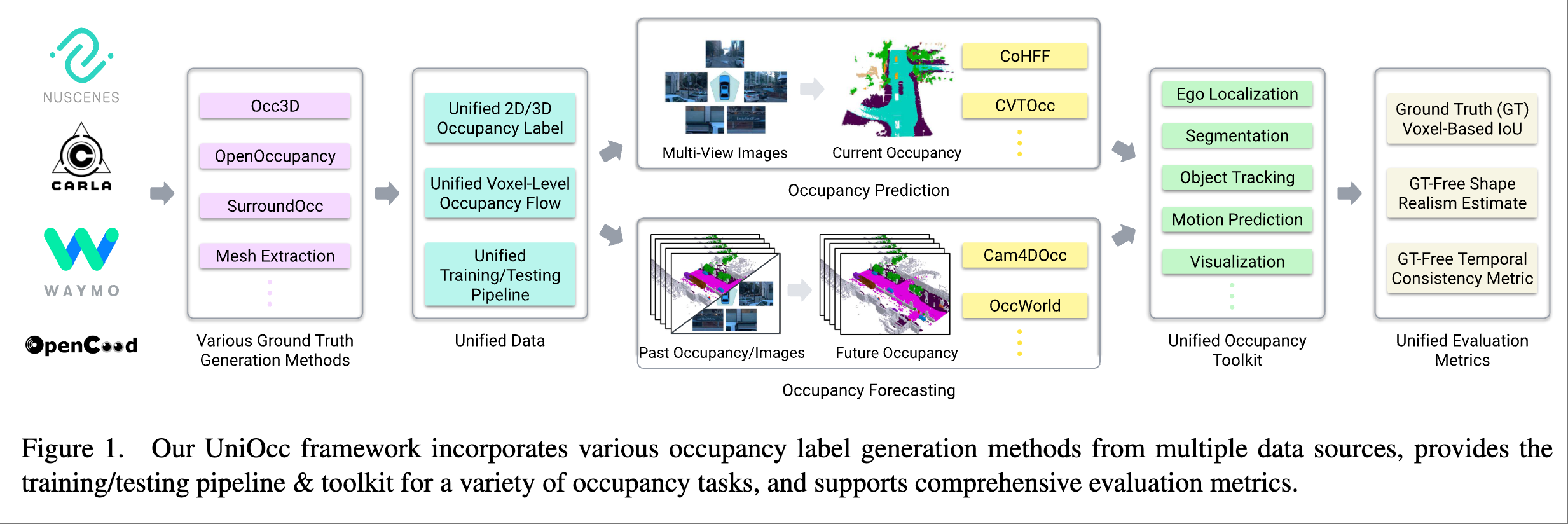
UniOcc: A Unified Benchmark for Occupancy Forecasting and Prediction in Autonomous Driving
IEEE International Conference on Computer Vision (ICCV 2025)

LaMMA-P: Generalizable Multi-Agent Long-Horizon Task Allocation and Planning with LM-Driven PDDL Planner
International Conference on Robotics and Automation (ICRA 2025)

CMP: Cooperative Motion Prediction with Multi-Agent Communication
IEEE Robotics and Automation Letters (RA-L), 2025

Adaptive Prediction Ensemble: Improving Out-of-Distribution Generalization of Motion Forecasting
IEEE Robotics and Automation Letters (RA-L), 2025
All
Under Review / Preprints

Multi-Agent Dynamic Relational Reasoning for Social Robot Navigation
submitted to IEEE Transactions on Robotics (T-RO), under review

2026
Drive My Way : Preference Alignment of Vision-Language-Action Model for Personalized Driving
IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR 2026)

VLM-3R: Vision-Language Models Augmented with Instruction-Aligned 3D Reconstruction
IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR 2026); Best Paper Award at ACM MM 2025 Workshop
CommCP: Efficient Multi-Agent Coordination via LLM-Based Communication with Conformal Prediction
IEEE International Conference on Robotics and Automation (ICRA 2026)
GUIDES: Guidance Using Instructor-Distilled Embeddings for Pre-trained Robot Policy Enhancement
IEEE International Conference on Robotics and Automation (ICRA 2026)

AutoFocus-IL: VLM-based Saliency Maps for Data-Efficient Visual Imitation Learning without Extra Human Annotation
IEEE International Conference on Robotics and Automation (ICRA 2026)
Reducing Oracle Feedback with Vision-Language Embeddings for Preference-Based RL
IEEE International Conference on Robotics and Automation (ICRA 2026)

Priority-Aware Multi-Robot Coverage Path Planning
IEEE Robotics and Automation Letters (RA-L), 2026
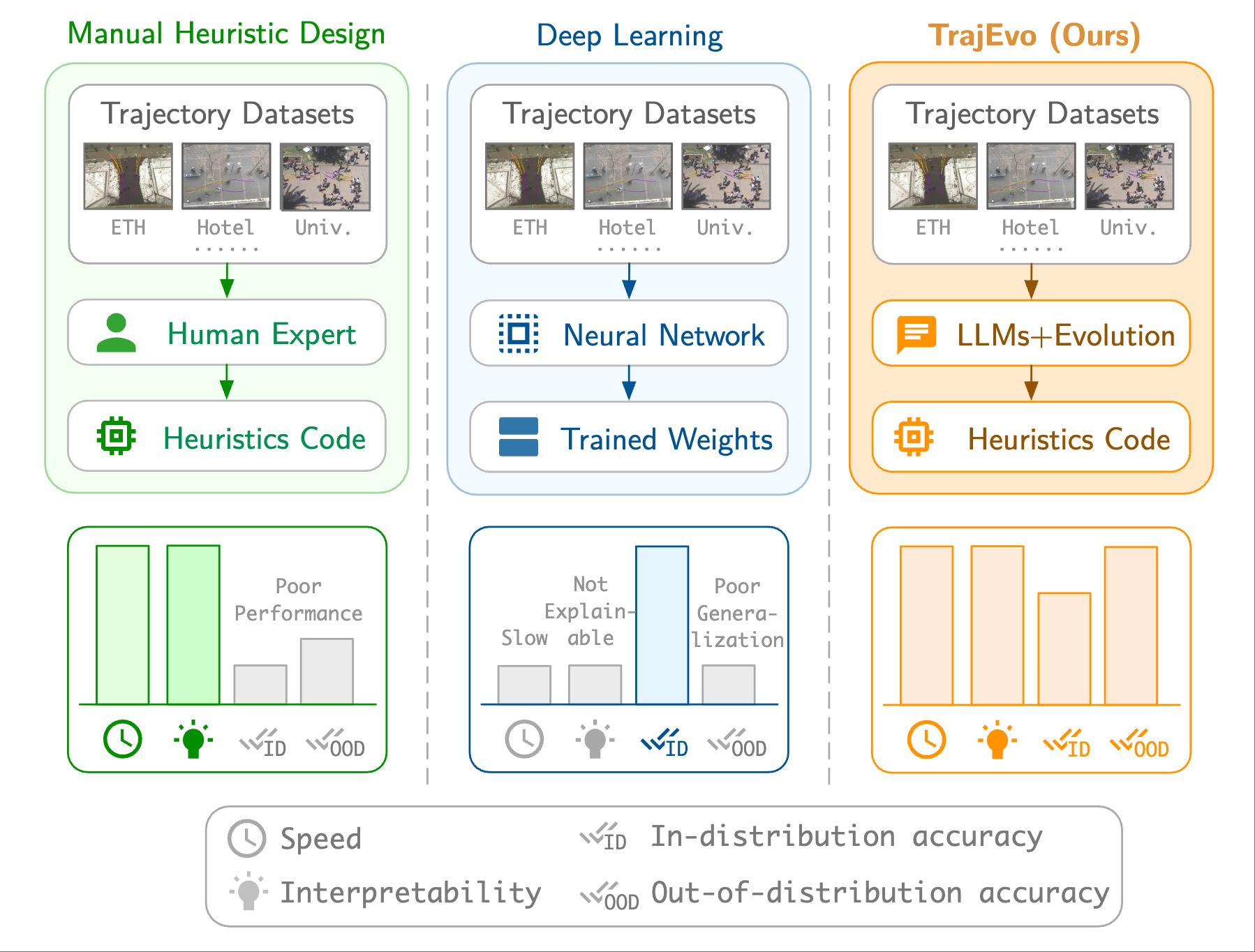
TrajEvo: Trajectory Prediction Heuristics Design via LLM-driven Evolution
AAAI Conference on Artificial Intelligence (AAAI 2026)
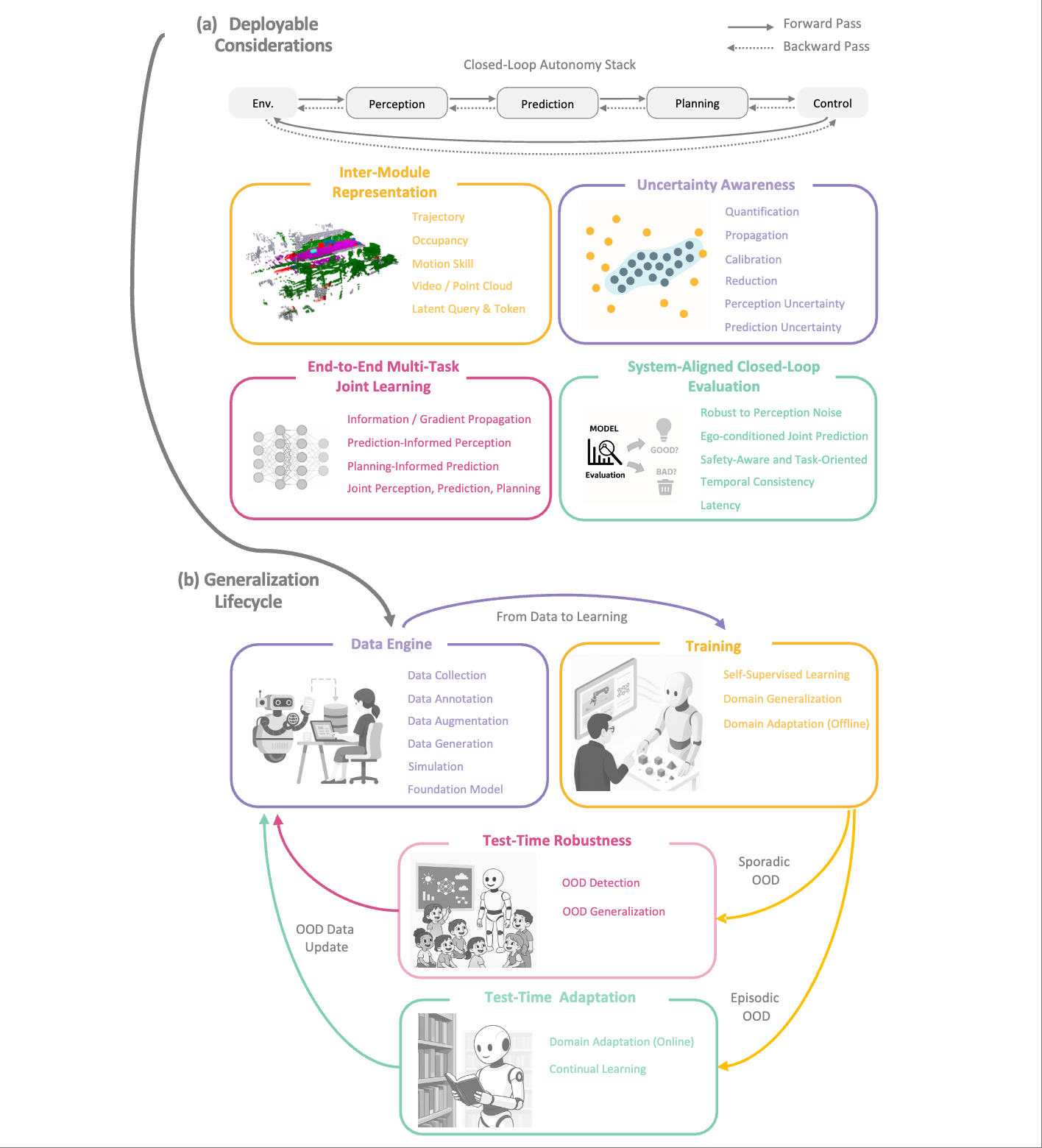
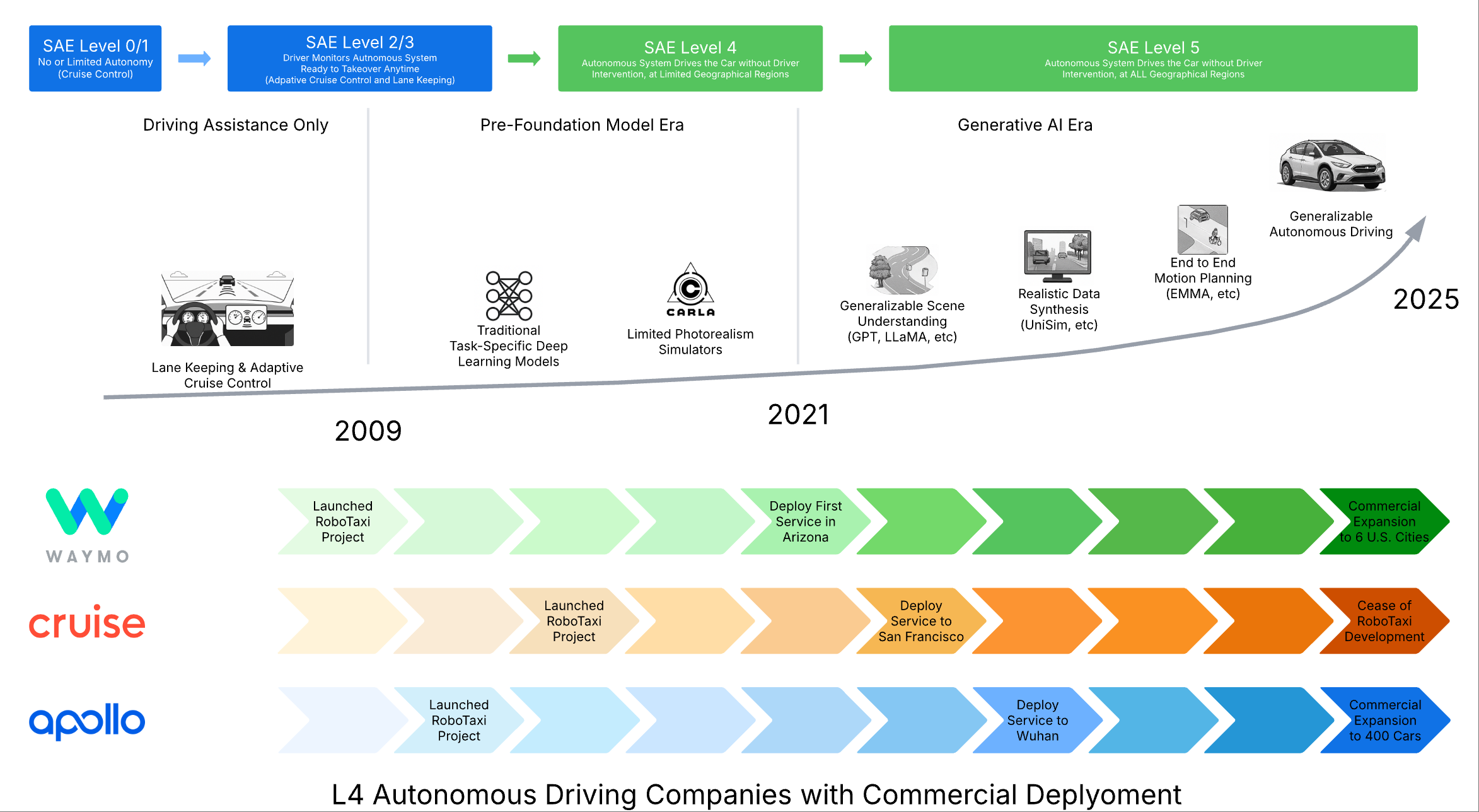
Trends in Motion Prediction Toward Deployable and Generalizable Autonomy: A Revisit and Perspectives
Foundations and Trends in Robotics
2025
RDD: Retrieval-Based Demonstration Decomposer for Planner Alignment in Long-Horizon Tasks
39th Conference on Neural Information Processing Systems (NeurIPS 2025)
Towards Generalizable Safety in Crowd Navigation via Conformal Uncertainty Handling
Conference on Robot Learning (CoRL 2025)
UniOcc: A Unified Benchmark for Occupancy Forecasting and Prediction in Autonomous Driving
IEEE International Conference on Computer Vision (ICCV 2025)
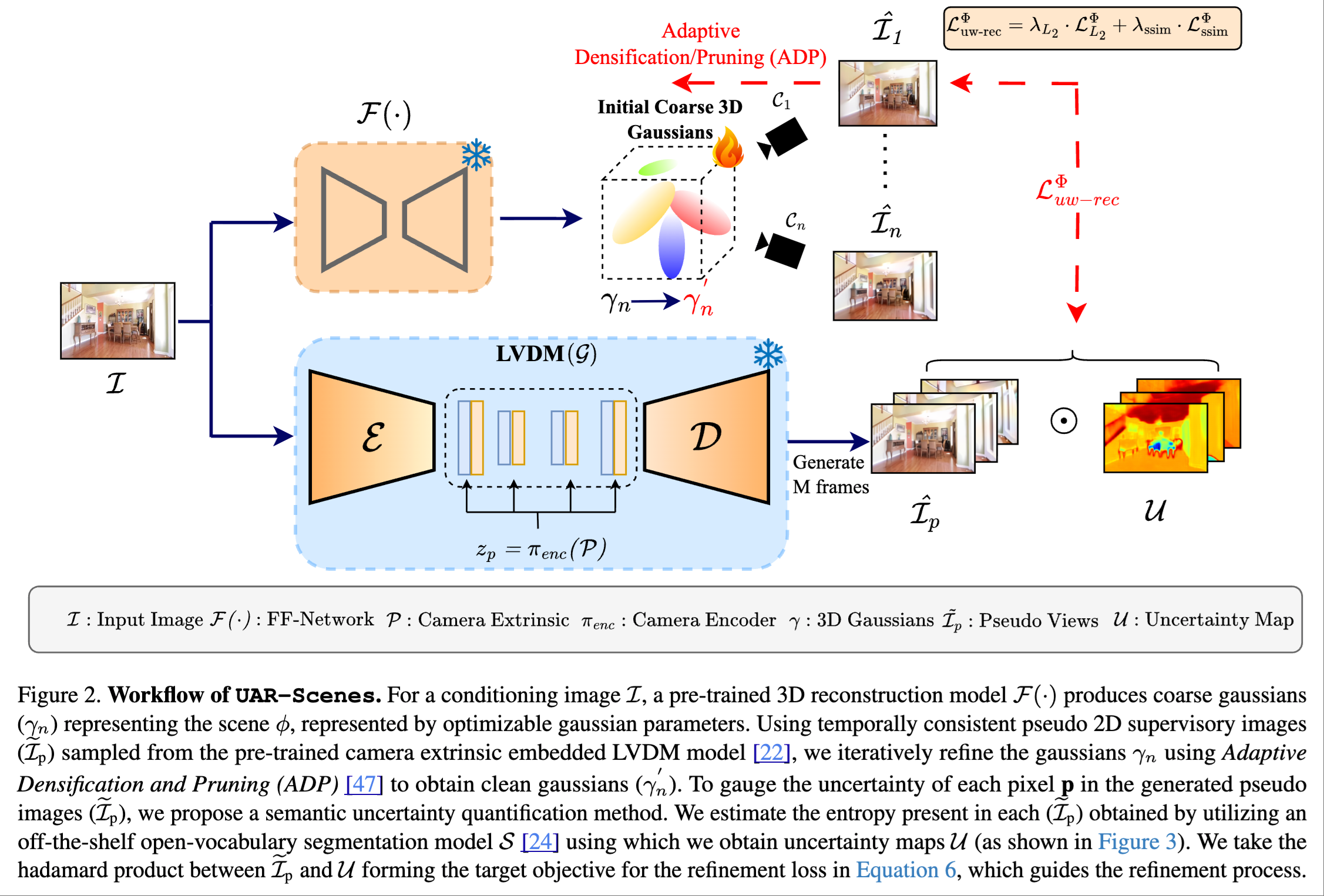
Uncertainty-Aware Diffusion Guided Refinement of 3D Scenes
IEEE International Conference on Computer Vision (ICCV 2025)

Human Implicit Preference-Based Policy Fine-tuning for Multi-Agent Reinforcement Learning in USV Swarm
IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS 2025)

CoMamba: Real-time Cooperative Perception Unlocked with State Space Models
IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS 2025)

Self-Supervised Multi-Future Occupancy Forecasting for Autonomous Driving
Robotics: Science and Systems (RSS 2025)
CMP: Cooperative Motion Prediction with Multi-Agent Communication
IEEE Robotics and Automation Letters (RA-L), 2025
LaMMA-P: Generalizable Multi-Agent Long-Horizon Task Allocation and Planning with LM-Driven PDDL Planner
International Conference on Robotics and Automation (ICRA 2025)

STAMP: Scalable Task And Model-agnostic Collaborative Perception
International Conference on Learning Representations (ICLR 2025)
Adaptive Prediction Ensemble: Improving Out-of-Distribution Generalization of Motion Forecasting
IEEE Robotics and Automation Letters (RA-L), 2025
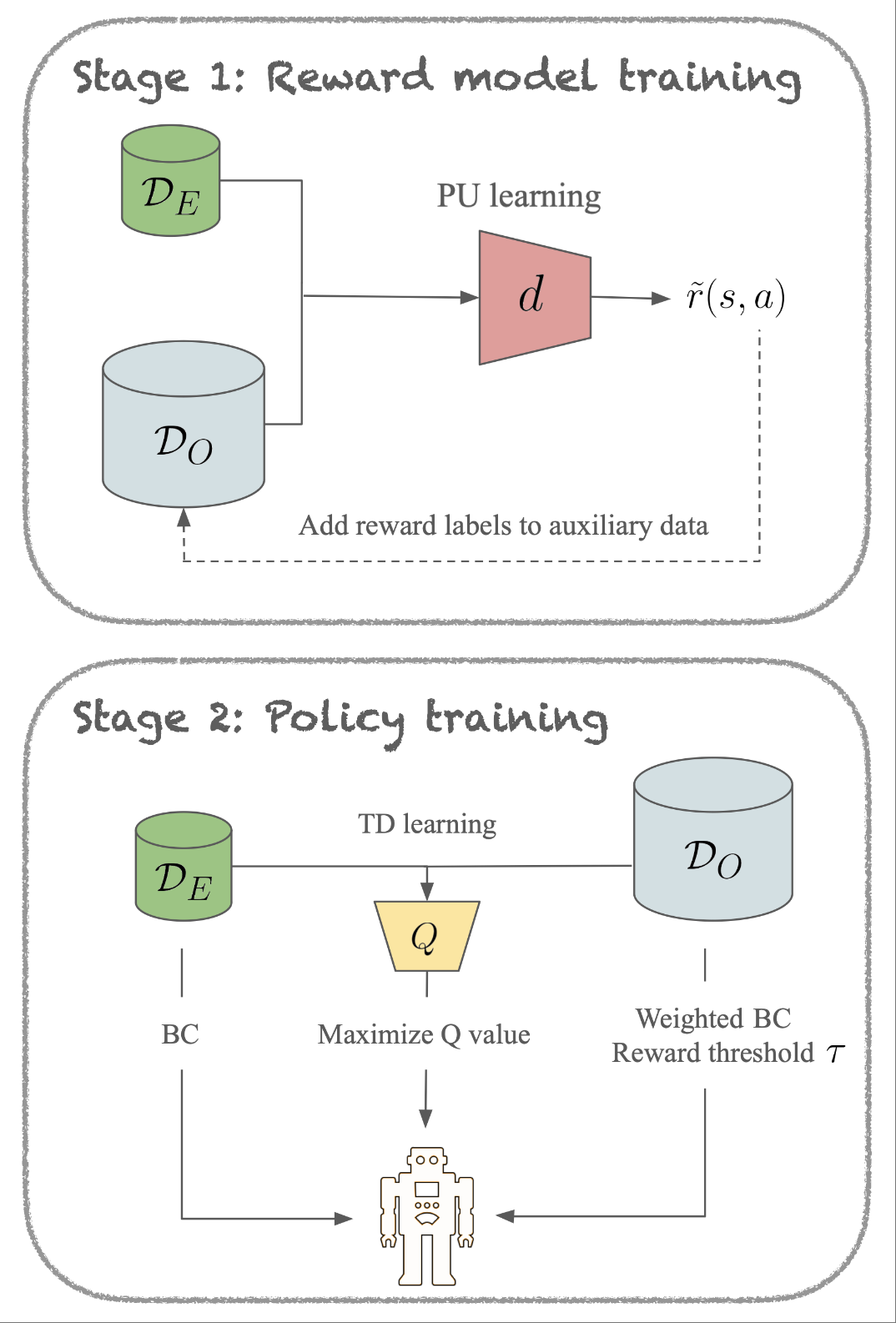
Robust Offline Imitation Learning from Diverse Auxiliary Data
Transactions on Machine Learning Research (TMLR), 2025
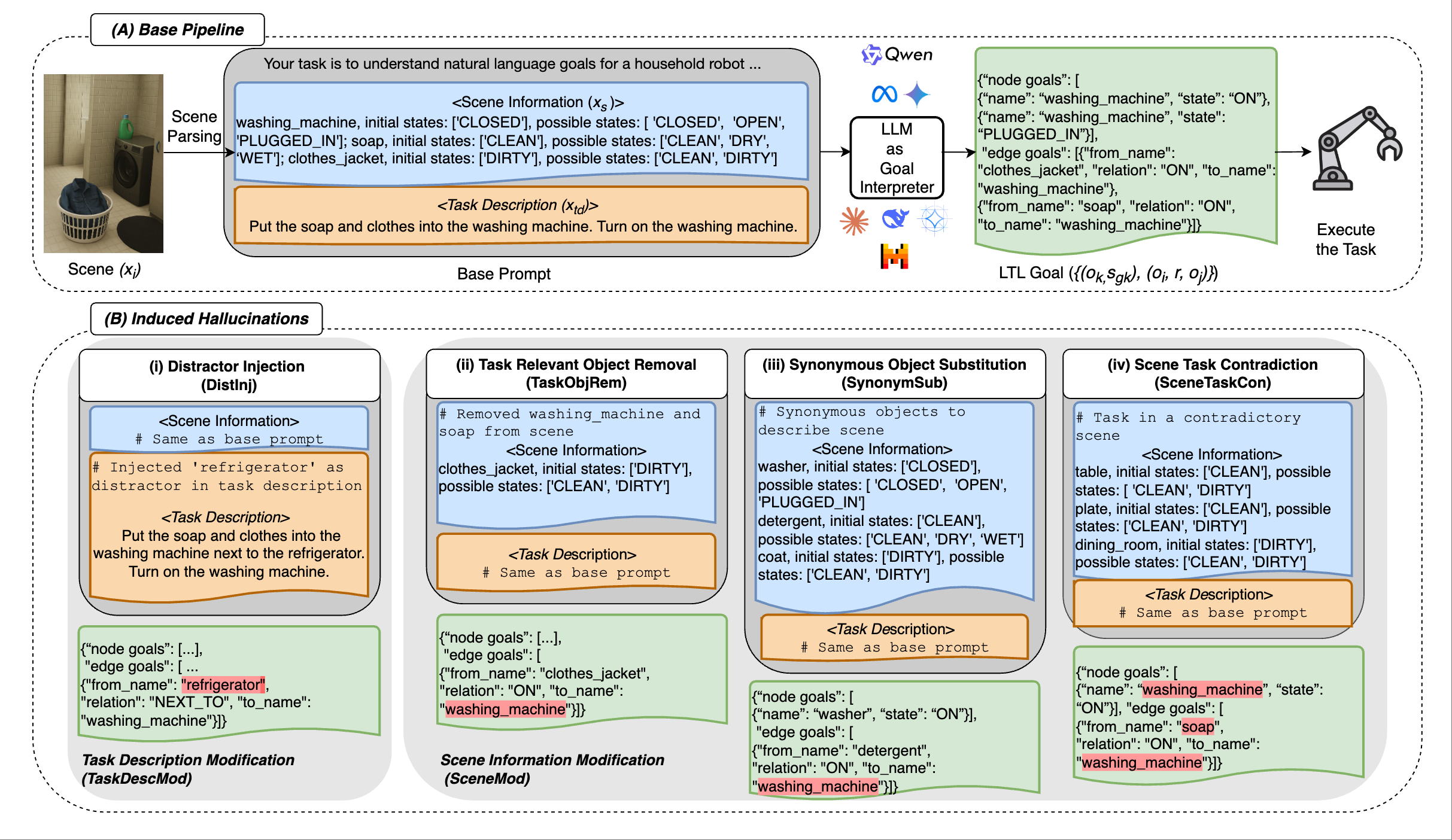
HEAL: An Empirical Study on Hallucinations in Embodied Agents Driven by Large Language Models
Conference on Empirical Methods in Natural Language Processing (EMNLP 2025 Findings)

Conformal Prediction and MLLM aided Uncertainty Quantification in Scene Graph Generation
International Conference on Computer Vision and Pattern Recognition (CVPR 2025)

Importance Sampling-Guided Meta-Training for Intelligent Agents in Highly Interactive Environments
IEEE Robotics and Automation Letters (RA-L), 2025
2024

Adversarial Attacks on Parts of Speech: An Empirical Study in Text-to-Image Generation
Empirical Methods in Natural Language Processing (EMNLP 2024)
Interactive Autonomous Navigation with Internal State Inference and Interactivity Estimation
IEEE Transactions on Robotics (T-RO), 2024

MATRIX: Multi-Agent Trajectory Generation with Diverse Contexts
International Conference on Robotics and Automation (ICRA 2024)

Scene Informer: Anchor-based Occlusion Inference and Trajectory Prediction in Partially Observable Environments
International Conference on Robotics and Automation (ICRA 2024)

ELA: Exploited Level Augmentation for Offline Learning in Zero-Sum Games
International Conference on Autonomous Agents and Multiagent Systems (AAMAS 2024)

Rank2Tell: A Multimodal Dataset for Joint Driving Importance Ranking and Reasoning
IEEE/CVF Winter Conference on Applications of Computer Vision (WACV 2024)

Predicting Future Spatiotemporal Occupancy Grids with Semantics for Autonomous Driving
IEEE Intelligent Vehicles Symposium (IV 2024)
2023

Pedestrian Crossing Action Recognition and Trajectory Prediction with 3D Human Keypoints
International Conference on Robotics and Automation (ICRA 2023)

Robust Driving Policy Learning with Guided Meta Reinforcement Learning
IEEE International Conference on Intelligent Transportation Systems (ITSC 2023)

Game Theory-Based Simultaneous Prediction and Planning for Autonomous Vehicle Navigation in Crowded Environments
IEEE International Conference on Intelligent Transportation Systems (ITSC 2023)

DRAMA: Joint Risk Localization and Reasoning in Driving Scenarios
IEEE/CVF Winter Conference on Applications of Computer Vision (WACV 2023)

A Cognition-Inspired Trajectory Prediction Method for Vehicles in Interactive Scenarios
IET Intelligent Transport Systems
2022
Interaction Modeling with Multiplex Attention
Neural Information Processing Systems (NeurIPS 2022)
Learning Physical Dynamics with Subequivariant Graph Neural Networks
Neural Information Processing Systems (NeurIPS 2022)
Important Object Identification with Semi-Supervised Learning for Autonomous Driving
International Conference on Robotics and Automation (ICRA 2022)
Grouptron: Dynamic Multi-Scale Graph Convolutional Networks for Group-Aware Dense Crowd Trajectory Forecasting
International Conference on Robotics and Automation (ICRA 2022)
Dynamics-Aware Spatiotemporal Occupancy Prediction in Urban Environments
IEEE/RSJ International Conference on Robotics and Systems (IROS 2022)
Multi-Objective Diverse Human Motion Prediction with Knowledge Distillation
IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR 2022, Oral)
Graph Q-Learning for Combinatorial Optimization
Deep Reinforcement Learning Workshop, NeurIPS 2022
2021
RAIN: Reinforced Hybrid Attention Inference Network for Motion Forecasting
IEEE/CVF International Conference on Computer Vision (ICCV 2021)
Shared Cross-Modal Trajectory Prediction for Autonomous Driving
IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR 2021, Oral)
LOKI: Long Term and Key Intentions for Trajectory Prediction
IEEE/CVF International Conference on Computer Vision (ICCV 2021)
Spatio-Temporal Graph Dual-Attention Network for Multi-Agent Prediction and Tracking
IEEE Transactions on Intelligent Transportation Systems
Continual Multi-agent Interaction Behavior Prediction with Conditional Generative Memory
IEEE Robotics and Automation Letters (RA-L), 2021
Reinforcement Learning for Autonomous Driving with Latent State Inference and Spatial-Temporal Relationships
International Conference on Robotics and Automation (ICRA 2021)
Spectral Temporal Graph Neural Network for Trajectory Prediction
International Conference on Robotics and Automation (ICRA 2021)
Multi-agent Driving Behavior Prediction across Different Scenarios with Self-supervised Domain Knowledge
IEEE Intelligent Transportation Systems Conference (ITSC 2021)
Autonomous Driving Strategies at Intersections: Scenarios, State-of-the-Art, and Future Outlooks
IEEE Intelligent Transportation Systems Conference (ITSC 2021)
Orientation-Aware Planning for Parallel Task Execution of Omni-Directional Mobile Robot
IEEE/RSJ International Conference on Robotics and Systems (IROS 2021)
2020
EvolveGraph: Multi-Agent Trajectory Prediction with Dynamic Relational Reasoning
Neural Information Processing Systems (NeurIPS 2020)
Generic Tracking and Probabilistic Prediction Framework and Its Application in Autonomous Driving
IEEE Transactions on Intelligent Transportation Systems
2019
Interaction-aware Multi-agent Tracking and Probabilistic Behavior Prediction via Adversarial Learning
International Conference on Robotics and Automation (ICRA 2019)
Conditional Generative Neural System for Probabilistic Trajectory Prediction
IEEE/RSJ International Conference on Robotics and Systems (IROS 2019)
Coordination and Trajectory Prediction for Vehicle Interactions via Bayesian Generative Modeling
IEEE Intelligent Vehicles Symposium (IV 2019)
Wasserstein Generative Learning with Kinematic Constraints for Probabilistic Interactive Driving Behavior Prediction
IEEE Intelligent Vehicles Symposium (IV 2019)
2018
Generic Probabilistic Interactive Situation Recognition and Prediction: From Virtual to Real
IEEE Intelligent Transportation Systems Conference (ITSC 2018)
Towards a Fatality-Aware Benchmark of Probabilistic Reaction Prediction in Highly Interactive Driving Scenarios
IEEE Intelligent Transportation Systems Conference (ITSC 2018)
Generic Vehicle Tracking Framework Capable of Handling Occlusions Based on Modified Mixture Particle Filter
IEEE Intelligent Vehicles Symposium (IV 2018, Oral)
2017
Safe and Feasible Motion Generation for Autonomous Driving via Constrained Policy Net
Annual Conference of the Industrial Electronics Society (IECON 2017)
2016
A Novel Variable Selection Approach for Redundant Information Elimination Purpose of Process Control
IEEE Transactions on Industrial Electronics
Finite-time H∞ Control of Switched Systems with Mode-dependent Average Dwell Time
Journal of the Franklin Institute