Facilities
Our lab has access to the following robots and equipment:

RealMan embodied dual-arm lifting platform is a robot for data collection and model training with autonomous navigation and mobility capabilities.

TIAGo++ is a mobile manipulator that can perform navigation and manipulation tasks, including object rearrangement, human-robot interaction, and bi-manual manipulation.
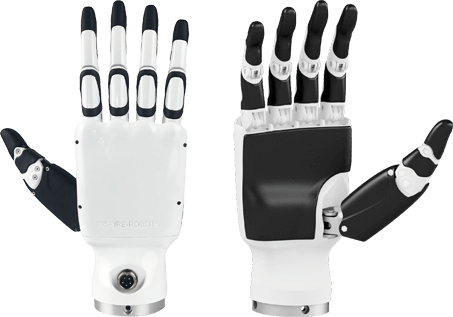
The humanoid five-finger dexterous hand features 6 degrees of freedom and 12 motion joints for precise grasping operations.
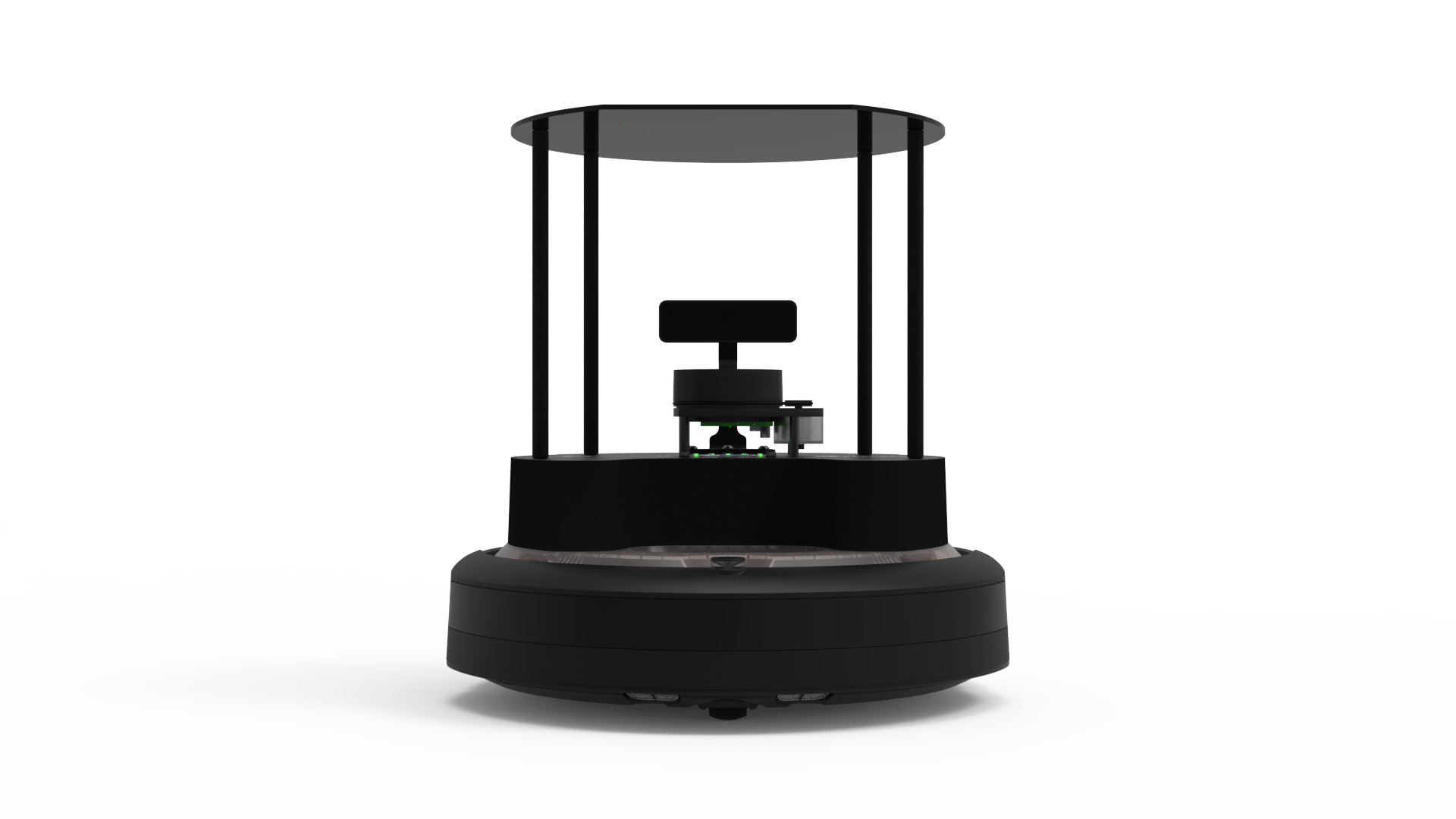
TurtleBot 4 is an advanced mobile robot that can perform various navigation tasks like collaborative navigation.
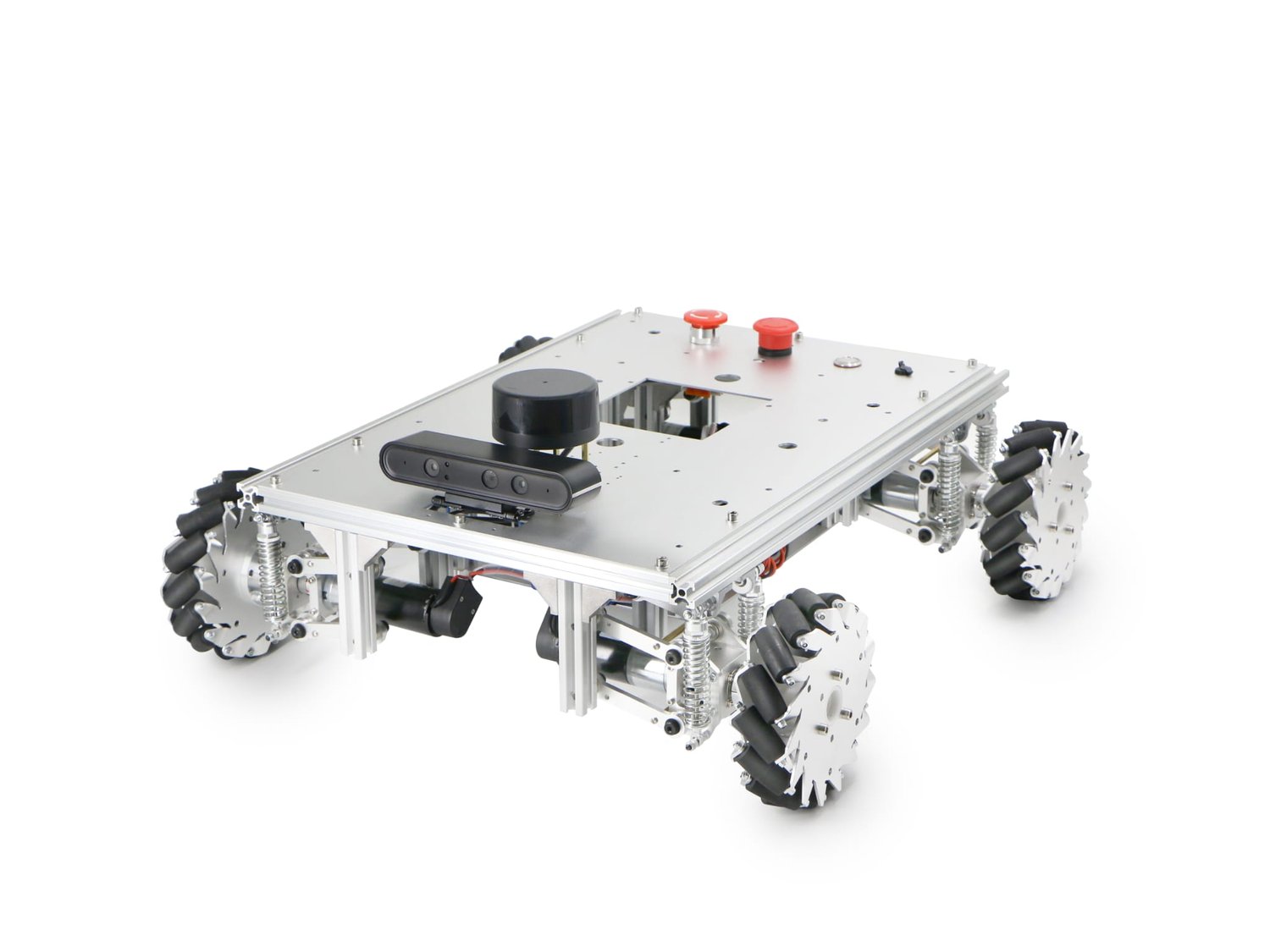
Mecabot Pro is a versatile mobile base with mecanum wheels, offering a 20 kg payload.

Kinova Gen3 is a manipulation robot that can perform tasks involving manipulation.
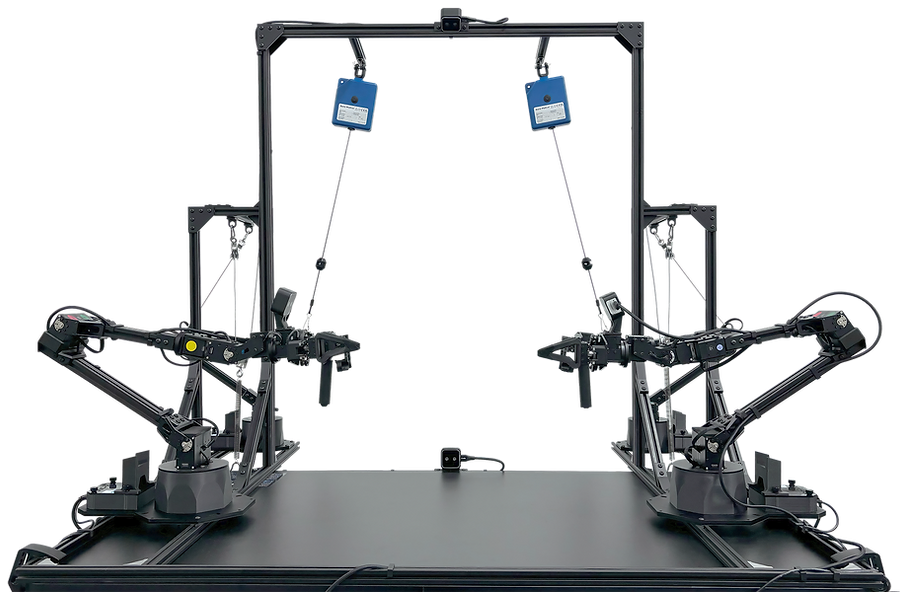
Aloha is a stationary platform that can perform tasks like bi-manual manipulation, teleoperation, and human-robot interaction.

Unitree Go2 is four-pedal walker that can perform tasks involving navigation and human-robot interaction.

Unitree B2 is four-pedal walker that can perform tasks involving navigation and human-robot interaction.

ROSMASTER R2 is an advanced mobile vehicle with an Ackerman steering structure, designed for tasks such as social navigation.

Meta Quest 3 is used for VR/AR integration in teleoperation and human-robot interactions.

Apple Vision Pro is used for interactive human-robot systems and teleoperation.